"Tethering" for Mobile Robot-Human Interaction
Mobile robots have the potential to assist people in a large variety of domains, including applications in medicine, the military, recreation, and industry. Here we are interested in assistive robots that autonomously follows people around, help carry loads and with other daily tasks. One challenge for such robots is navigation through complex and highly dynamic environment (with a lot of people). So it deems necessary for the user to have constant awareness of the robot's state, and be able to control the robot under certain conditions (robot gets stuck by obstacles, or behaves unexpectedly).
To solve this problem, we propose a "tethering" system, which enables bidirectional communication between human and the robot follower. The system consists of novel haptic interfaces, as well as intelligent algorithms for humna-robot interaction.

Robot Platform and Algorithms
We use a customized turtlebot 2 as our mobile robot platform. We have implemented autonomous human tracking with a Microsoft Kinect (RGB-D sensor). The robot can follow the user and keep a desired distance. Once the robot gets stuck by an obstacle, or lost track of the user, it will stop, and try to communicate with the user via the "tether".
Tether System Hardware
The tether system consists of two parts:
-
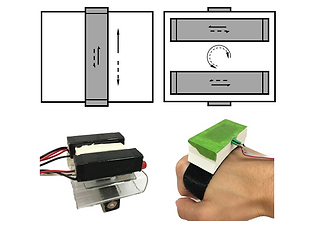
A haptic interface based on asymmetric vibration. Asymmetric vibration can create a pulling sensation that is similar to an ungrounded force. The vibration is typically generated by controlling a voice coil to accelerate faster in one direction while slower in the other direction.
-
A human input interface: we used an 9-axis IMU to sense the movement of the user's hand. This enables us to implement intuitive gesture controls.